Я всегда мечтал создать робота, которым можно управлять с помощью компьютера и смотреть за его перемещениями от первого лица.
Весь процесс я условно разделил на три части:
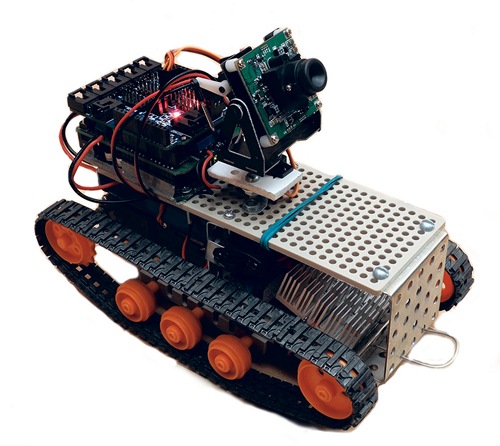
1. Сборка робота
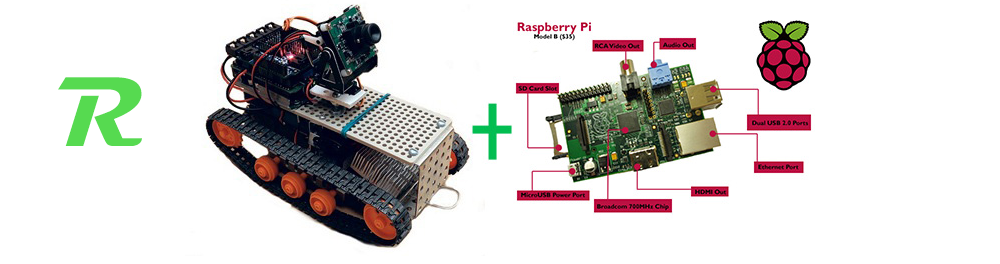
2. Видеоподсистема и связь
3. Программирование управления с ПК