Мультикоптеры были чем-то фантастическим, затем они стали привычными и понятными, а теперь уже становятся бытовой игрушкой и появляется множество более-менее стандартных конфигураций на разные кошельки и потребности.
И вот как раз в такой момент, как и с любой техникой, подтягиваются китайские компании — они выпускают продукт на откатанной платформе, делают его максимально дешевым и начинают максимально агрессивно завоевывать рынок. В том числе и российский.
У меня на тестировании оказалась новинка, о которой пока крайне мало информации в сети.
Называется она Central UAS A350.
Визуально квадрокоптер напоминает всем известный DJI Phantom, Walkera QR350 Pro и им подобные, но передние лучи длиннее задних и на носу символ, напоминающий лого бэтмена.

Аппарат достаточно интересный, на первый взгляд он попадает в нишу бытовой видеосъемки с воздуха и FPV полетов без претензий на гоночные характеристики, но зато с продвинутыми возможностями автоматики.
Информации, кроме общих характеристик, в инете по A350 я не нашел и решил сделать большой и подробный обзор. Включая разбор полетного контроллера, доработку и настройку.
Конкурент DJI Phantom? Проверим.
(Под катом большое количество тяжелых фотографий)
Аппарат бывает в трех комплектациях:
- Стандартная (~ $315)
- FPV (~ $413)
- с 2D подвесом для GoPro (~ $510)
Мне досталась самая полная комплектация. Но у китайцев не бывает все так просто и замечательно. Чуть позже расскажу почему.
Приехал коптер в невзрачной картонной коробке, внутри которой все аккуратно разложено в углубления в прозрачном блистере. Но хранить в блистере неудобно — он предназначен для нахождения внутри коробки, т.к. внешней стенки нету.
В блистере


Во всех трех комплектациях аппарат с GPS и из коробки умеет зависать в точке по GPS, возвращаться домой по команде с пульта, при потере связи с пультом и экстренно самостоятельно садиться при просадке батарейки ниже определенного уровня. Но пользоваться автоматическими режимами без предварительной настройки нельзя ни в коем случае, хоть они и работают!
Корпус и качество сборки

Качество пластика хорошее, корпус собран аж на 26 винтах. Нижняя половина из черного пластика, верхняя — белый пластик, крашенный в черный цвет. Под моторами спереди и сзади по три светодиода. Спереди постоянно горят красным. Сзади синие светодиоды мигают при включении (DISARMED) и постоянно горят в режиме ARMED.
Сверху находится большой RGB светодиод. В режиме калибровки он зеленый, в режиме поиска GPS — синий мигающий, при наличии 3D GPS Fix — постоянно горит синим.
Хвостовой киль чисто декоративный, никакой функции он не несет, внутри пустой.
Снизу у коптера выводы для подключения подвеса — вход видеопередатчика и выход питания камеры, вывод питания от полетного аккумулятора для питания подвеса и коннектор для управления подвесом по двум осям.
Шасси крепятся тремя длинными винтами.

Четыре точки для крепления подвеса к сожалению не совпадают с отверстиями на подвесе, а сзади верхняя пластина подвеса немного упирается в шасси 🙂 Китайцы в своем репертуаре. Поэтому пришлось просверлить 2 отверстия рядом. Ничего критичного, все встало нормально.
Доработанное крепление подвеса

ВМГ
Винтомоторная группа до степени смешения похожа на Phantom — моторы без опознавательных знаков, пропеллеры 24см (~9.5″) с самозатягивающейся резьбой. Пропеллеры попарно отмечены черным и серебристым колпачком — затягивать их нет нужды, в направлении вращения они затягиваются сами при работе моторов. Это очень удобно — не нужны инструменты для снятия и установки пропеллеров, можно снимать их для транспортировки меньше чем за минуту и так же быстро поставить на место. Пластик довольно гибкий, прочный, не хрупкий.
Скорее всего подойдут пропеллеры от фантика.
FPV возможности
Мне досталась версия, укомплектованная аналоговой камерой в носовой части, встроенным видеопередатчиком на 5.8ГГц и 4.3″ монитором со встроенным приемником, который крепится комплектным кронштейном на аппаратуру радиоуправления.
Производитель почему-то говорит о 6Мп камере, но на деле камера аналоговая (для FPV — это очень хорошо) и очень приличного качества.
Приемник монитора с завода настроен на 7й канал и об этом написано карандашом на наклейке заботливым китайцем. Канал приемника выбирается DIP переключаетелем на обратной стороне монитора. А вот канал передатчика без разбора коптера не поменять, поэтому лучше ничего не трогать — все работает прямо из коробки, монитор заряжен и достаточно его включить, чтобы увидеть картинку с борта коптера.
Картинка вполне приличная

Антенна огромная, чем оправданы такие габариты для 5.8ГГц, даже не знаю. Кронштейн алюминиевый и крепится парой винтов на ручку передатчика, а монитор навинчивается на кронштейн. Крепление монитора пластиковое.

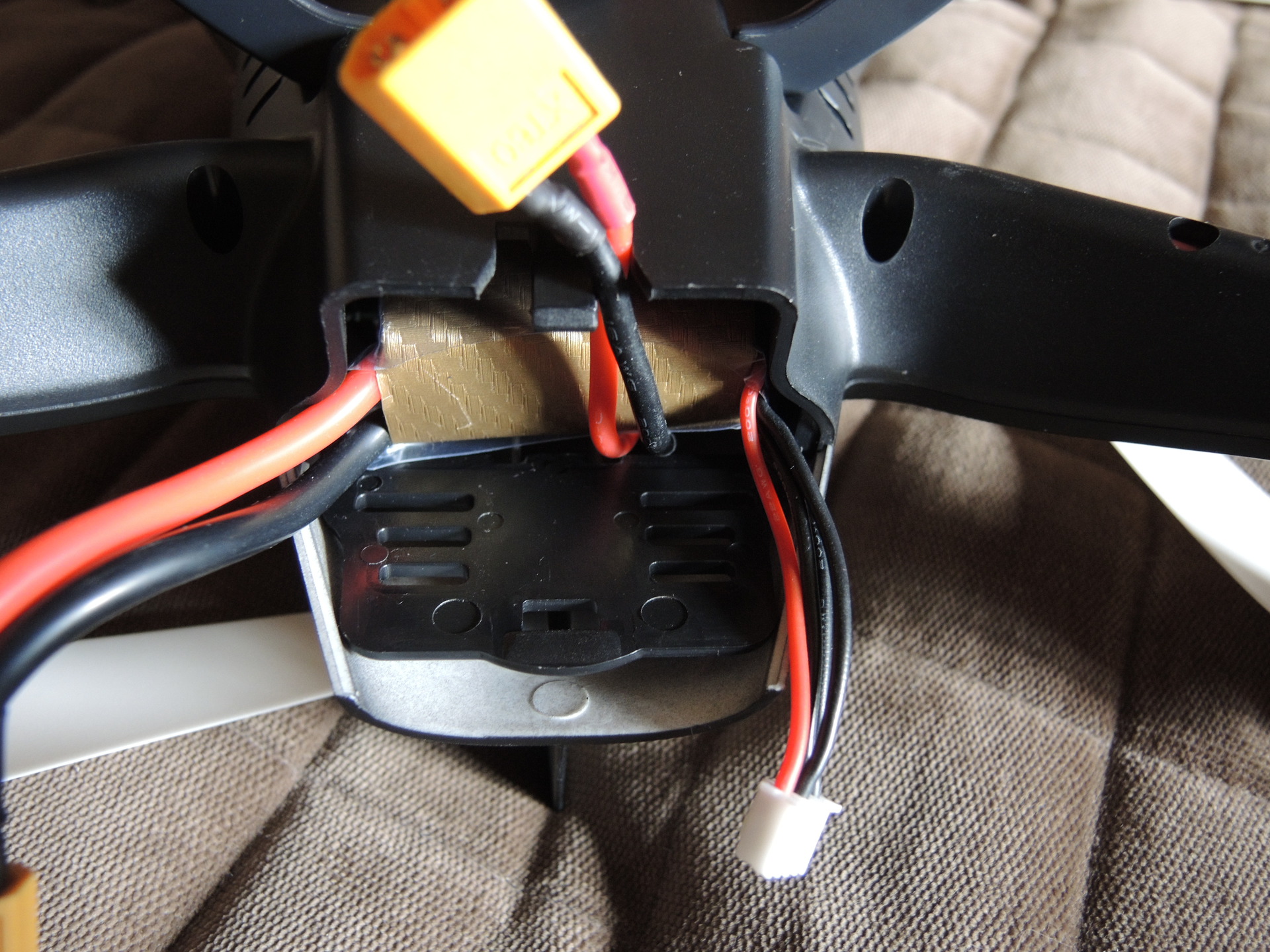
Питание
Питается коптер от LiPo аккумулятора 3S, а вот по емкости данные расходятся. Мне достался на 3700мАч, судя по данным зарядки. Разъем питания XT60, так что можно поставить любой совместимый по размерам аккумулятор.
размер штатного 42х23х138 мм. Провода балансировочного разъема силиконовые, что очень хорошо. Аккумулятор сидит в отсеке очень плотно, свободного места по длине еле хватает, чтобы спрятать провода внутрь отсека и закрыть дверцу. По ширине запаса нет, по высоте практически нет.
В комплекте идет зарядное устройство SkyRC E3 мощностью 15W для 2S и 3S аккумуляторов. AC адаптер встроенный, подключается напрямую в 220В, ЗУ очень компактное, но за это приходится платить мощностью — 15W хватает на 3S всего на 1А зарядного тока.

Поэтому заряжаться аккум будет долго — часа 4 минимум. Зато для зарядки таким током нужен только балансный разъем. Я использую свою зарядку — Accucell 6 на 50w. Заряжаю током 5А.
Из недостатков — два уголка на краях батарейного отсека довольно острые, я о них порезался и советую пройтись наждачной бумагой или надфилем.
Батарейный отсек
Аккумулятора должно хватать минут на 15 полета, но на деле чуть меньше — видеопередатчик кушает довольно прилично (и греется тоже прилично), а FailSafe настроен так, что пытается посадить аппарат чуть ли не с третью остаточной емкости. Впрочем, это можно настроить, но китайцы ни за что не расскажут как 🙂
Пульт управления (RC Tx)
Пульт управления китайцы сделали свой, но протокол использовали спектрумовский — DSMX. Это хорошо, можно использовать передатчики Spektrum или Orange. Протокол достаточно надежный, производитель заявляет радиус действия 800-1300м на при прямой видимости на открытой местности, значит мощность передатчика скорее всего в районе 50-100мВт.
У пульта 8 каналов, но в они хитро смикшированы в 7.
Корпус пульта полноразмерный, ухватистый, держать его удобно. Это не игрушечный пульт хабсана — размером и формой очень напоминает Turnigy 9x, только чуть попроще. Сразу с завода стоят удобные анодированные регулируемые стики (копия стиков Spektrum DX6), очень удобные, пружины мягкие, управлять довольно удобно. Триммеры цифровые.
Никакого экрана нет вообще, есть кнопки выбора режима Mode1 и Mode2, кнопка переключения расходов DualRate (D/R) и кнопка Bind для связывания с приемником в коптере.

правый (SW2)
в положении 0 — режим Stabilize
в положении 1 — режим GPS Hold — удержание позиции в 3D
в положении 2 — RTL (Return To Launch — возврат домой)
Положение 2 — на себя до конца.
SW1 — должно быть управление подвесом, но на деле управляет дополнительными тремя полетными режимами
в положении 0 — режим Stabilize
в положении 1 — режим Alt Hold — удержание высоты
в положении 2 — Stabilize + Simple mode — режим стабилизации с CareFree — фиксация курса относительно точки взлета
Но все режимы SW1 работают только если SW2 в положении «0». При переключении SW2 он имеет приоритет над SW1.
Также имеются два потенциометра для плавного управления подвесом: CH7 и CH8
Колесо справа от надписи i8 — муляж. Скопировано для антуража со Spektrum DX6.
Питается передатчик от 4 батареек АА или аккумулятора 2S LiPo. Внутри батарейного отсека есть разъем JST-XH, но аккумулятор положить некуда — отсек только для батареек. Можно спрятать его в корпус — места там полно.
А что внутри пульта?
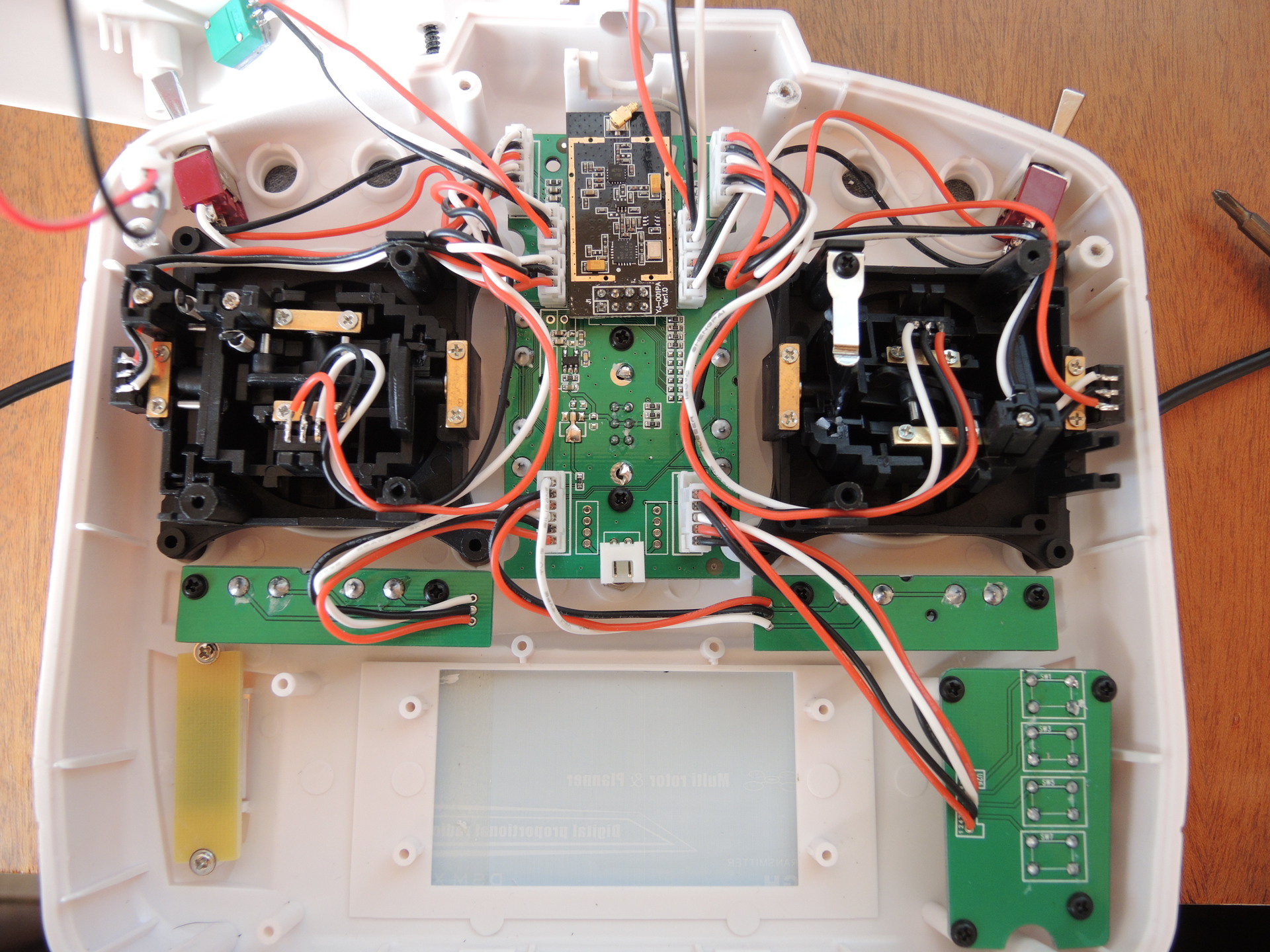
а внутри практически ничего нет. Стики, пара плат кнопок триммеров, плата с кнопками режимов. Провода качественные, силиконовые, что удивительно, даже в дорогих пультах это редкость. Все на винтиках и разъемах, никакого термоклея. А вот качество пайки не очень. Прочно, но некрасиво.
Весь функционал пульта реализован одной крошечной черной платой — и ВЧ часть и логика и обработка кнопок и потенциометров — все на ней. На плате всего два чипа и запаяна она намертво, с обратной стороны на распределительной плате нет вообще ничего, кроме выключателя, светодиода и пищалки:

Сама плата управления и ВЧ:
ВЧ часть построена на широко известном NRF24L01
Начинка коптера
Не знаю как вам, а мне страшно управлять коптером, когда я не понимаю как он себя поведет в различных ситуациях. А для этого мне нужно знать что у него внутри, как он устроен и иметь возможность настроить его. Коптер — штука весьма сложная, поэтому возможность настройки нужна обязательно. Даже вылизанный DJI Phantom нужно иногда настраивать и подстраивать под себя. Поэтому путь у нас один — разбираем!
Полетный контроллер FC
Полетный контроллер — это самая большая интрига. Что китайцы выбрали в качестве мозга коптера? Ведь от него зависит и функциональность и надежность и возможность настройки и качество стабилизации в ручном и автоматическом режимах.
Откручиваем 26 винтов, снимаем крышку, отсоединяем провод, идущий к светодиоду в крышке.
Сверху крышки полетника наклеена крошечная коробочка на мягкий двусторонний скотч. Разбор показывает, что это магнитометр (компас), подключенный по шине I2C. Ага! Знакомо.
Выносной модуль магнитометра

Снимаем магнитометр и видим, что в качестве полетного контроллера китайцы выбрали Global Fly 3.

На полетнике загадочная надпись на ленте малярного скотча «250». Отклеиваем, нам не понадобится.
Что это? Для ответа на этот вопрос придется заглянуть под капот снова. Снимаем крышку FC (по углам 4 штифта, пока я это выяснил, два из них сломал, но это не критично, два держат достаточно жестко. Достаточно вставить отвертку в щель и аккуратно раздвинуть половинки) и видим, что это творчески переработанная китайцами версия APM 2.5.2. Версия платы 5.0.
В Ghost и Cheerson CX20 стоит точно такой же комплект версии 2.0. Соответственно, можно ожидать аналогичной работы, если компоновка окажется удачной и удастся полностью настроить автоматику. Это хорошая новость.
Разбираем полетный контроллер
Полетный контроллер выполнен мезонином: внизу все коннекторы, кроме USB, на верхнем этаже микроконтроллер, сенсоры. Соединяются платы двумя двухрядными коннекторами.

Полетный контроллер, вид сверху



Плата коннекторов
Я было обрадовался наличию порта TELEM. Там и правда оказался UART. Но не тот. У APM2.5.2 выведен UART2 (Serial3), а здесь выведен Serial2. Телеметрия в него не выводится и подключить радиомодем пока не удалось. Ищу способ скомпилировать прошивку так, чтобы можно было подключить радиомодем 3DR через Serial2. Штатно такой функции в прошивке нету.
Но и это еще не все. Распиновка разъема телеметрии в точности зеркальная по сравнению с родным APM2.5. Хотя разъем 5-пиновый точно такой же. Если смотреть сверху, на фотографии слева направо — GND, NC, Rx, Tx, Vcc (+5V).
Регуляторы хода (ESC)
Регуляторы хода собственного производства, некие M8_BLDC_VER6.0, построены на Atmega8, то есть клон какого из популярных вариантов. Претензий к ним нет, работают. Но никакой влагозащиты или термоусадки. Все силовые провода силиконовые, припаяны не очень аккуратно, но припоя не жалели.
Однако, регули прикручены на винт к предусмотренному месту на луче, а не на термоклее как ожидалось. Это прогресс.
Немного фотографий ESC


Силовая плата разработана специально для коптера — к ней коннекторами подключается подсветка на лучах, шнурком выведен USB разъем с полетного контроллера на силовую плату поближе к дверце батарейного отсека. Разведен модуль питания 5В для полетного контроллера и RC приемника. Сам приемник подключен по протоколу PPM Sum. Силовая плата также подключена с возможностью снимать значение напряжения бортовой батареи и настроен ее мониторинг полетным контроллером.
Кнопка биндинга приемника также выведена на край силовой платы, чтобы доступ к ней был без разбора корпуса коптера.
Китайцы неплохо поработали. Не сказать, чтобы продукт получился идеальный, но вполне заслуживающий внимания.
Что огорчает, это качество пайки — повсеместно оно очень невысокое. При этом сами платы изготовлены весьма неплохо, компоненты использованы тоже вполне качественные, а вот ручная работа оставляет желать лучшего — сборка не очень аккуратная, провода размещены не слишком аккуратно.
GPS модуль
В качестве GPS приемника используется модуль BeStar BN-280. Это аналог модуля Ublox NEO-8N. Он также умеет работать с GNSS созвездиями GPS и ГЛОНАСС и поддерживает бинарный протокол обмена ubx на частоте 5Гц, который используется в APM. Модуль изначально настроен на скорость обмена 38400, выдачу данных по протоколу ubx на частоте 5Гц без информации о спутниках — то есть выдача оптимизирована. Ничего лишнего, только по делу и то, что нужно для полета.
BeStar BN-280 GPS

А вот расположен не очень удачно — на двойном слое двустороннего скотча вплотную к полетному контроллеру, а не вынесен в выпуклость корпуса, как ожидалось и рядом находится видеопередатчик, что тоже не способствует комфортной работе GPS антенны.
Камера и перед
Камера закреплена термоклеем, подключена силиконовыми проводами, питается от BEC, который довольно прилично греется. Но картинка с нее очень неплохая.
А вот видеопередатчик вполне приличный — это 32канальный 200mW TS5823


Сзади DIP переключатели выбора канала, питается передатчик от бортового аккумулятора.
Со стандартной антенны снят защитный колпачок для компактности, сама антенна размещена ближе к хвосту, хорошее решение.
Как летает?
А как настроишь. Любой коптер на APM требует настройки для полета в автомате. Заводская настройка выполнена неплохо:
Акселерометр скалиброван сносно и аппарат неплохо держит горизонт,
регулятор хода скалиброваны
аппаратура скалибрована и настроена.
Но, при включении удержания GPS коптер начинает унитазить с большим радиусом и приличной скоростью, калибровка компаса ничего пока не дала. Надеюсь, удастся настроить после подключения телеметрии.
Внимание! Коптер настроен так, что при срабатывании Failsafe по напряжению, он выполняет автопосадку, но с некалиброванным компасом это превращается в бешено вращающийся коптер, который переворачивается, зацепившись шасси за траву.
Поэтому летать с некалиброванным компасом опасно!
Подвес для GoPro
В комплекте идет двухосевой подвес YUN 2D. Механически подвес очень качественный, аккуратный, никаких проводов, датчик размещается во фрезерованном углублении, все провода спрятаны, моторы закрытые.

А вот плата управления — нелицензионная копия AlexMos — обновить прошивку нельзя, подключиться можно только старой версией программы настройки. Сама плата прикреплена просто на двусторонний скотч, а не винтики.
И это бы ничего, полбеды, но одна ось оказалась нерабочей — два транзистора оси ROLL пробиты, звонятся насквозь, и неизвестно, это проблема ключей или сама плата дефектная и при замене ключей они опять прогорят. Ключи греются как сумасшедшие и я буду благодарен, если кто-то подскажет как отремонтировать.
Плата подвеса

При этом, если отключить ось ROLL, PITCH стабилизируется практически идеально, нареканий нет. То есть подвес настроен хорошо и работает из коробки.
В описании сказано, что подвес подходит для GoPro или SJ4000, но реально он подходит только для GoPro. SJ4000 больше в толщину за счет встроенного экрана и ее нельзя закрепить комплектной скобой — винтики коротковаты. А найти длинные винтики М2 в продаже довольно сложно.
Тем не менее SJ4000 отлично держится за счет силы трения.
Выводы
Итак, конкурент ли это DJI Phantom? C точки зрения качества и стабильности определенно нет.
А вот конкуренцию самосборному коптеру на APM или 3DR IRIS аппарат вполне может составить. он неплохо укомплектован, настроен с завода, имеет крепеж для подвеса, можно использовать для FPV полетов по камере, можно снимать неплохое видео. Если приобрести вариант без подвеса, то можно поставить ZenMuse для GoPro или любой другой 3х осевой подвес.
Аппарат уже оснащен подсветкой, что позволяет комфортно летать вечером, есть индикатор GPS фиксации и состояния ARM/DISARM.
В целом, это хороший коптер как для начинающего, так и для тех, кто хочет компактную вместительную раму, но иметь возможность залезть в мозги для настройки.
Поэтому на вопрос — стоит ли он своих денег? Я бы сказал — определенно стоит. Все компоненты модульные, заменяемые, стандартные, купить монитор получше, передатчик помощнее или другую аппаратуру, подвес для камеры проблемы не составит, если понадобится. Также коптер вполне ремонтопригоден.
Где купить?
Мой экземпляр отсюда
Магазинчик русифицирован, доставка в Россию бесплатная, менеджеры-китайцы, но говорят по русски.
Наверняка скоро появится и в других магазинах, но на момент заказа в инете были только анонсы.