Мультикоптеры были чем-то фантастическим, затем они стали привычными и понятными, а теперь уже становятся бытовой игрушкой и появляется множество более-менее стандартных конфигураций на разные кошельки и потребности.
И вот как раз в такой момент, как и с любой техникой, подтягиваются китайские компании — они выпускают продукт на откатанной платформе, делают его максимально дешевым и начинают максимально агрессивно завоевывать рынок. В том числе и российский.
У меня на тестировании оказалась новинка, о которой пока крайне мало информации в сети.
Называется она Central UAS A350.
Визуально квадрокоптер напоминает всем известный DJI Phantom, Walkera QR350 Pro и им подобные, но передние лучи длиннее задних и на носу символ, напоминающий лого бэтмена.

Аппарат достаточно интересный, на первый взгляд он попадает в нишу бытовой видеосъемки с воздуха и FPV полетов без претензий на гоночные характеристики, но зато с продвинутыми возможностями автоматики.
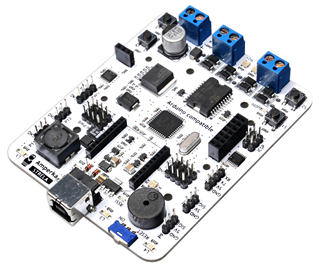
Информации, кроме общих характеристик, в инете по A350 я не нашел и решил сделать большой и подробный обзор. Включая разбор полетного контроллера, доработку и настройку.
Конкурент DJI Phantom? Проверим.
(Под катом большое количество тяжелых фотографий)
Разберем до последнего винтика